Junhwa HurHello! I am a research scientist at Google DeepMind in Cambridge, MA, USA. I received my Ph.D. at Technische Universität Darmstadt, where I was supervised by Prof. Stefan Roth Ph.D. at Visual Inference group. I received my M.Sc. at Seoul National University and B.Sc. at POSTECH. Email / CV / Google Scholar / Github / LinkedIn |

|
Academic Service
• Area chair: ECCV (2024, 2026), CVPR (2025, 2026), ICCV (2025), NeurIPS (2025, 2026) |
Research |
|

|
UFO-4D: Unposed Feedforward 4D Reconstruction from Two ImagesJunhwa Hur, Charles Herrmann, Songyou Peng, Philipp Henzler, Zeyu Ma, Todd Zickler, Deqing Sun ICLR, 2026 paper / arxiv / project |

|
Emergent Temporal Correspondences from Video Diffusion TransformersJisu Nam, Soowon Son, Dahyun Chung, Jiyoung Kim, Siyoon Jin, Junhwa Hur, Seungryong Kim NeurIPS, 2025 paper / arxiv / project / code |

|
Motion Prompting: Controlling Video Generation with Motion TrajectoriesDaniel Geng, Charles Herrmann, Junhwa Hur, Forrester Cole, Serena Zhang, Tobias Pfaff, Tatiana Lopez-Guevara, Carl Doersch, Yusuf Aytar, Michael Rubinstein, Chen Sun, Oliver Wang, Andrew Owens, Deqing Sun CVPR, 2025 Oral presentation paper / arxiv / project |

|
MonST3R: A Simple Approach for Estimating Geometry in the Presence of MotionJunyi Zhang, Charles Herrmann, Junhwa Hur, Varun Jampani, Trevor Darrell, Forrester Cole, Deqing Sun*, Ming-Hsuan Yang* ICLR, 2025 Spotlight presentation paper / arxiv / project / code |

|
High-Resolution Frame Interpolation with Patch-based Cascaded DiffusionJunhwa Hur*, Charles Herrmann*, Saurabh Saxena, Janne Kontkanen, Wei-Sheng (Jason) Lai, Yichang Shih, Michael Rubinstein, David J. Fleet, Deqing Sun *Equal contribution AAAI, 2025 paper / arxiv / project |

|
Lumiere: A Space-Time Diffusion Model for Video GenerationOmer Bar-Tal, Hila Chefer, Omer Tov, Charles Herrmann, Roni Paiss, Shiran Zada, Ariel Ephrat, Junhwa Hur, Guanghui Liu, Amit Raj, Yuanzhen Li, Michael Rubinstein, Tomer Michaeli, Oliver Wang, Deqing Sun, Tali Dekel, Inbar Mosseri SIGGRAPH Asia 2024, 2024 paper / arxiv / project |


|
Telling Left from Right: Identifying Geometry-Aware Semantic CorrespondenceJunyi Zhang, Charles Herrmann, Junhwa Hur, Eric Chen, Varun Jampani, Deqing Sun, and Ming-Hsuan Yang NeurIPS, 2024 paper / arxiv / project / code |

|
WonderJourney: Going from Anywhere to EverywhereHong-Xing Yu, Haoyi Duan, Junhwa Hur, Kyle Sargent, Michael Rubinstein, William T. Freeman, Forrester Cole, Deqing Sun, Noah Snavely, Jiajun Wu, Charles Herrmann CVPR, 2024 paper / arxiv / project / code |
|
Boundary Attention: Learning Curves, Corners, Junctions and GroupingMia Gaia Polansky, Charles Herrmann, Junhwa Hur, Deqing Sun, Dor Verbin, Todd Zickler ECCVW, 2024 paper / arxiv / project / code |

|
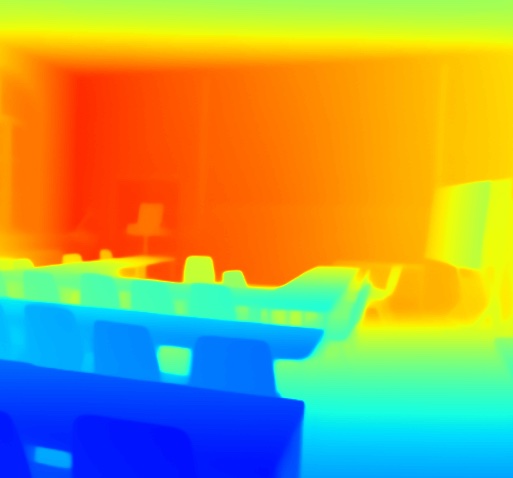
Zero-Shot Metric Depth with a Field-of-View Conditioned Diffusion ModelSaurabh Saxena, Junhwa Hur, Charles Herrmann, Deqing Sun, and David J. Fleet ECCVW, 2024 paper / arxiv / project |

|
The Surprising Effectiveness of Diffusion Models for Optical Flow and Monocular Depth EstimationSaurabh Saxena, Charles Herrmann, Junhwa Hur, Abhishek Kar, Mohammad Norouzi, Deqing Sun, and David J. Fleet NeurIPS, 2023 Oral presentation paper / arxiv / project |


|
A Tale of Two Features: Stable Diffusion Complements DINO for Zero-Shot Semantic CorrespondenceJunyi Zhang, Charles Herrmann, Junhwa Hur, Luisa Polania Cabrera, Varun Jampani, Deqing Sun, and Ming-Hsuan Yang NeurIPS, 2023 paper / supp / arxiv / project / code |

|
Self-supervised AutoFlowHsin-Ping Huang, Charles Herrmann, Junhwa Hur, Erika Lu, Kyle Sargent, Austin Stone, Ming-Hsuan Yang, and Deqing Sun CVPR, 2023 paper / supp / arxiv / code Self-supervised AutoFlow learns to generate an optical flow training set through self-supervision on the target domain. |
|
RAFT-MSF: Self-Supervised Monocular Scene Flow Using Recurrent OptimizerBayram Bayramli, Junhwa Hur, and Hongtao Lu IJCV, 2023 paper / arxiv For self-supervised monocular scene flow, our RAFT-backbone-based approach significantly improves the scene flow accuracy and even outperforms a semi-supervised method. |

|
Self-Supervised Surround-View Depth Estimation with Volumetric Feature FusionJung Hee Kim*, Junhwa Hur*, Tien Phuoc Nguyen, and Seong-Gyun Jeong *Equal contribution NeurIPS, 2022 paper / code Our voxel-based approach to surround-view depth estimation improves metric-scale depth accuracy and can synthesize a depth map at arbitrary rotated views. |


|
Joint Motion, Semantic Segmentation, Occlusion, and Depth EstimationJunhwa Hur Ph.D. Dissertation, Technische Universität Darmstadt, 2022 paper In this dissertation, we propose how to jointly formulate multiple tasks for scene understanding and what kind of benefits can be obtained from the joint estimation. |

|
MasKGrasp: Mask-based Grasping for Scenes with Multiple General Real-world ObjectsJunho Lee, Junhwa Hur, Inwoo Hwang, and Young Min Kim IROS, 2022 paper / video We introduce a mask-based grasping method that discerns multiple transparent and opaque objects and finds the optimal grasp position avoiding clutter. |


|
Self-Supervised Multi-Frame Monocular Scene FlowJunhwa Hur and Stefan Roth CVPR, 2021 paper / supp / arxiv / code / talk In the multi-frame setup, using ConvLSTM + warping hidden states improves the accuracy and the temporal consistency of the monocular scene flow. |


|
Self-Supervised Monocular Scene Flow EstimationJunhwa Hur and Stefan Roth CVPR, 2020 Oral presentation paper / supp / arxiv / code / talk We propose to estimate scene flow from only two monocular images with a CNN trained in a self-supervised manner. |
|
Optical Flow Estimation in the Deep Learning AgeJunhwa Hur and Stefan Roth Modelling Human Motion, N. Noceti, A. Sciutti and F. Rea, Eds., Springer, 2020 paper / arxiv As a book chapter, we comprehensively review CNN-based approaches to optical flow and their technical details, including un-/semi-supervised methods. |


|
Iterative Residual Refinement for Joint Optical Flow and Occlusion EstimationJunhwa Hur and Stefan Roth CVPR, 2019 paper / supp / arxiv / code An iterative residual refinement scheme based on weight sharing reduces the number of network parameters and improves the accuracy of optical flow and occlusion. |

|
UnFlow: Unsupervised Learning of Optical Flow with a Bidirectional Census LossSimon Meister, Junhwa Hur and Stefan Roth AAAI, 2018 Oral presentation paper / arxiv / code / slide By directly training on the target domain with an improved unsupervised loss, our method outperforms a supervised method that is pre-trained on a synthetic dataset. |

|
MirrorFlow: Exploiting Symmetries in Joint Optical Flow and Occlusion EstimationJunhwa Hur and Stefan Roth ICCV, 2017 paper / supp / arxiv / code / poster The chicken-and-egg relationship between optical flow and occlusion can be nicely formulated through exploiting the symmetry properties they have. |


|
Joint Optical Flow and Temporally Consistent Semantic SegmentationJunhwa Hur and Stefan Roth ECCV Workshop on Computer Vision for Road Scene Understanding and Autonomous Driving (ECCVW), 2016 Best paper award paper / arxiv / poster We propose a method for the joint estimation of optical flow and temporally consistent semantic segmentation, which closely connects the two problem domains and allows each task leverage the other. |


|
Generalized Deformable Spatial Pyramid: Geometry-Preserving Dense Correspondence EstimationJunhwa Hur, Hwasup Lim, Changsoo Park, and Sang Chul Ahn CVPR, 2015 paper / supp / project / video A piece-wise similarity transform along pyramid levels can approximate a non-rigid deformation in the semantic matching problem. |
|
Design / source code from Jon Barron's / Leonid Keselman's website |